
“차량 주변 인식 정확도 혁신”…UNIST, AI 신기술 통해 자율주행 신뢰성 강화→산업 지형 변화
자율주행차 기술 패러다임이 정밀 인식 능력 고도화라는 화두 아래 새로운 전환점을 맞이하고 있다. 울산과학기술원(UNIST)은 카메라 기반 자율주행 시스템이 원근 왜곡 문제로 인한 인식 한계를 뛰어넘을 수 있도록, 인공지능(AI) 기반의 영상 보정 기술 VPOcc(Vanishing Point Guided Occupancy)을 개발했다고 15일 공식 발표했다. 본 기술은 자율주행 차량의 신뢰성과 안전성 측면에서 핵심적 전기를 마련하는 계기로 평가된다.
현재 자율주행차 및 각종 로봇 인식 시스템은 카메라와 라이다(LiDAR) 등 다양한 센서 데이터를 토대로 주변 환경을 스캔한다. 카메라는 라이다 대비 경량, 저비용, 고해상도의 장점으로 주목받고 있으나, 3차원 외부 세계를 2차원 평면 영상으로 변환하는 과정에서 거리별 물체 크기가 왜곡되고, 이에 따라 실시간 인식 정확도 저하 및 위험 요소 검출 누락 현상이 빈번하게 발생한다. 특히 도로 주행 상황에서 근거리와 원거리 객체의 비례적 왜곡은 자율주행의 신뢰성에 치명적 영향을 미친다.
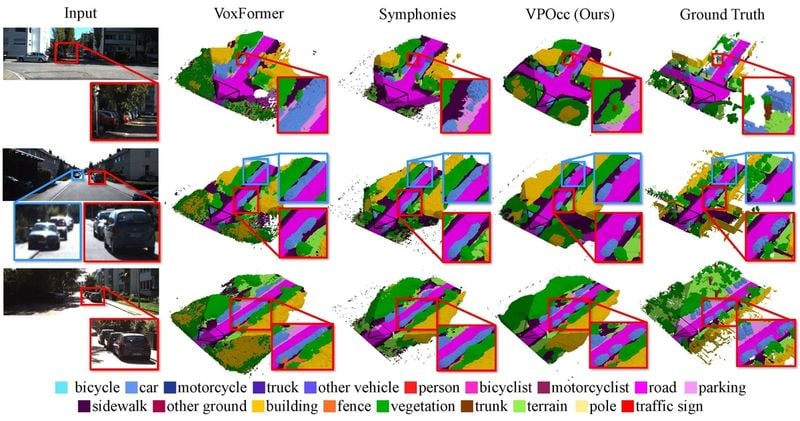
UNIST 인공지능대학원 주경돈 교수팀은 르네상스 화가들이 풍경의 원근감을 현실적으로 구현하기 위해 도입한 '소실점' 개념을 AI에 적용, 영상 속에서 거리별 깊이 정보를 복원하는 독자적 알고리즘을 설계했다. VPOcc 모델은 소실점을 중심 좌표로 삼아, 왜곡된 2차원 이미지를 실제 공간 정보에 가깝게 재해석한다. 이를 통해 자율주행차가 도로 차선, 보행자, 주변 사물을 원래 거리와 형태에 충실하게 판별할 수 있도록 설계됐다. 연구팀에 따르면 이러한 접근은 로봇 시스템, 증강현실(AR) 지도 제작, 스마트 감시 등 다각적 산업군으로 즉각 응용 가능성이 높다.
이번 성과는 지능형 로봇 분야에서 세계적 권위를 인정받는 IROS(International Conference on Intelligent Robots and Systems)에서 공식 발표되었으며, AI 기반 자율주행 신경망 연구의 새로운 교두보로 관심을 모으고 있다. 업계 전문가들은 AI의 공간 정보 해상도가 자율주행차 안전성 한계를 획기적으로 개선할 기술적 단초로 작용할 것이라 전망했다. 아울러 UNIST 연구진은 향후 국내외 주요 자동차 제조사 및 IT 기업과의 협업을 확대해 기술 상용화와 유관 산업의 생태계 전반에 변혁을 일으킬 방침임을 시사했다.